Hello tout le monde !
Ingénieur Lyonnais de 28 ans, études & développement en informatique et électronique embarqué, spécialisé dans les véhicules électrique et autonomes,
Je tenais à vous présenter officiellement un projet plutôt atypique
(Oui c'est un peu tard, j'en parle que maintenant.... c'est par ce que je n'étais pas sur que cela fonctionnerai
Depuis décembre 2019, je me suis lancé sur un projet de restaurer + robotiser modulairement une Peugeot 205.
Hors restaurations, je vous présente les 4 grosses phases :
1. Robotisation

Photo du 31 octobre 2022
- La partie qui m'a plus pris la tête.
Robotisation modulaire, cet à dire que toutes mes modifications sont redémontable "facilement" sans modifications notables. C'est l’intérêt de mon projet.
L'idée est d'installer une direction assistée électrique modulable que j'ai modifié afin qu'elle réagit uniquement si le VCU (ci-dessous) est alimentée. Ce qui permet de ne plus avoir une direction... assistée, et de conserver la maniabilité d'origine de la direction, et ne pas avoir besoin de passer l'étape d'homologation tant que le dispositif est ÉTEINT (Confirmation d'un contact travaillant aux mine)
De même pour les pédales, j'ai réalisé une platine avec des servo-moteurs de haut couple permettant de piloter les pédales via le VCU ci-dessous)
2. 1992, dépourvus de calculateur(s) ?
L'électronique, ça n'existait pas (c'est bien mieux comme ça... dit-il
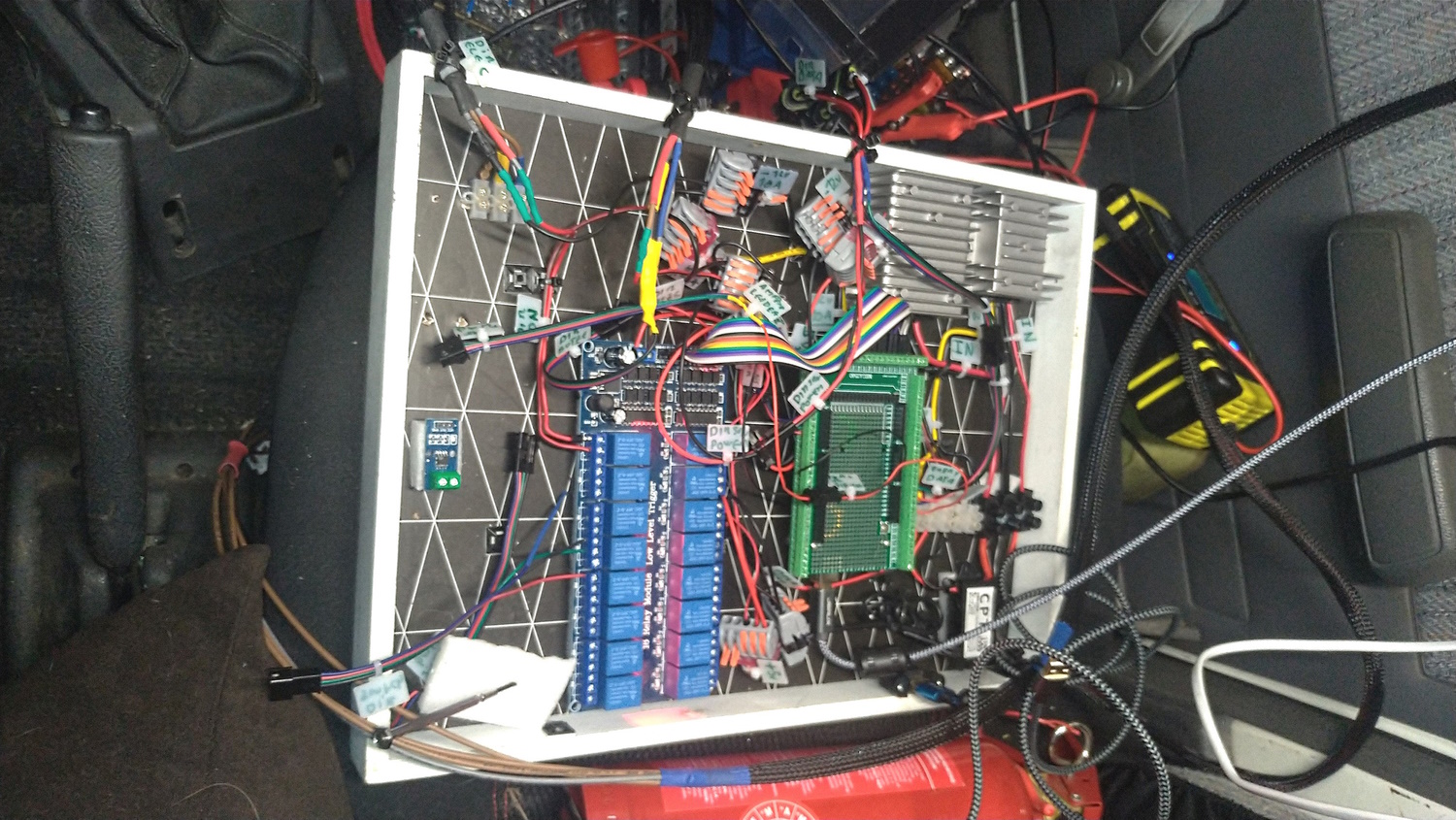
Photo du 31 octobre 2022
- Afin de robotiser et "informatiser" le pilotage et les mesures, j'ai donc développé mon propre calculateur VCU sur un processeur ATMega32 + écriture du firmware sur une planche en bois, puis sur une PCB (en cours de conception) - L'idée avec ce VCU piloté par un PC, est de monitorer températures, débit d'essence, position crémaillère direction, pression d'huile, position des pédales, levier vitesse, odométrie, gyroscopie, et de piloter la direction, les pédales et le levier de vitesse avec des verin /servo moteurs de haut couple.
3. La powerbox

Photo du 31 octobre 2022
- Fait maison avec du recyclage de composants, monitorée et pilotable, ce boîtier permettant de filtrer/stabiliser, répartir, protéger et séparer l'alimentation électrique 12v du véhicule considérée comme instable, avec les équipements sensibles (capteurs, PC etc..)
4. Le logiciel

Aperçu depuis une capture d'un lidar 3D Velodyne VLP128
- Développé from scratch (de zéro), un ensemble de 7 logiciels modulables communiquant entre-eux en langage C#, C et C++ à destination de l'open source, tel que :
-
- Perception 3D
Principalement un gestionnaire multi-capteurs. Ce dernier communique avec tous les capteurs (Lidars 2D/3D, caméras, radars et sonars...) du véhicule et génère une scène 3D avec la projection de nuages de points de l'ensemble des capteurs pour les envoyer au module FUSION.
Ce module exploite la technologie DirectX 11/12 basé sur le moteur de jeux vidéo 3D Tzu3D développé par un ami, Wahid Garci, afin d'exploiter la puissance des cartes graphiques des PC
- - Vision
Fonctionnant avec 4 caméras fisheyes, ce module permet de "labelliser", autrement dit "reconnaître" et donner un nom aux obstacles formelles détectés par le module PERCEPTION, pour but d'adapter un meilleur comportement au lieu de freiner bêtement à chaque fois qu'un capteur détecte une feuille d'un arbre!.
- - Fusion
Permettant de rassembler toutes les informations du véhicule (perception 3D + vision + orientation gyroscopique + mémoire cartographique + GPS) , puis de "FILTRER" et de faire un "packaging léger" de toutes ces données pour y envoyer au module DECISION, puis au module IHM et BLACKBOX
- - Decision
Pour l'instant, aussi idiot qu'un aspirateur robot, ce module permet de prédire des scénarios simples, et d'envoyer des informations de pilotage au module ACTION par rapport aux capteurs, caméras, position, vitesse du véhicule etc...
Ce module envoie des informations de pilotage au module ACTION
- - Action
Permettant d'envoyer et recevoir en CAN/RS232 des informations du calculateur VCU pour piloter ou recevoir des informations du véhicule
- - BlackBox
Disposé dans un raspberry PI dans un coffre en métal, ce module permet simplement d'enregistrer sur un gros disque dur, les informations reçu. Tel que les informations des capteurs + obstacles + caméras pendant 24h en continue + toutes les informations des 6 modules permettant au debugage, comprendre les bugs, crashs.
- - IHM
Affiché sur l'écran tactile de bord, ce dernier permet d'afficher un rendu 3D simplifié et plus accueillant de ce que voit le véhicule, et les caméras. Depuis ce module il est actuellement possible de piloter quelques éléments du véhicule, et d'écrire manuellement un message sur les deux panneaux d'affichage LEDS disposés devant et derrière la Peugeot pour communiquer avec les autres usagers. «CLIOGNOTANT C***RD »
»
-
Ces 7 logiciels modulables ont spécifiquement étés conçu pour fonctionner sur 1 ou réparti sur plusieurs PC en réseau, l'intérêt est la possibilité (si on le souhaite) de répartir les charges/rôles de chaque applications cités ci-dessus.
Contrairement à la majorité des constructeurs, j'ai, volontairement PAS utilisé les logiciels déjà tout fait et dominants tel que ROS, PCL, Nvidia Drive, RTMaps, OpenAI etc... Pourquoi ?
Tout simplement par ce que je n'aime pas être dépendant d'entités, de licences limitées ou payantes, de mises à jours... J'ai toujours préféré tout faire maison, c'est passionnant, et je kiff ça
Lors oui pour certains c'est de gâchis de faire subir ça à une Peugeot, mais au moins elle ne finit pas à la casse, ni dans les mains du kéké tuning, mais dans un projet sérieux à fort intérêt, et qui visiblement n'existe nulle part ailleurs

(Je réalise les mêmes travaux sur une Bolloré Bluecar électrique)
J'ai récemment publié une vidéo d'introduction où je vais "introduire de série de vidéos" présentant mes bricolages à la caméra frontale depuis fin 2021.
Je vous laisse découvrir la suite !
https://www.youtube.com/watch?v=KIx4xMo9FSM
Je suis ouvert à toutes questions ! N'hésitez pas !!
Si ça intéresse quelqu'un de suivre l'aventure je laisse mes liens là :
- Instagram : SPinti.tech (très actif)
- YouTube : Sebouney
- Discord : SPinti Software
- Site web : SPinti Software
- LinkedIn : Compte professionnel